Learn OpenGL
介绍
开始
window
GLFW
a library, written in C, specifically targeted at OpenGL
gives us the bare necessities required for rendering goodies to the screen.
GLAD
an open source library
triangle
shaders
small programs on GPU for each step of pipeline
language: GLSL(OpenGL Shading Language)
pipeline
(primitive assembly stage)
first: vertex shader;
in:single vertex;
main for transform 3d coord
out:
(optional) geometry shader
geometry shader
in: vetices collection
to generate shapes
out: rasterization stage
(rasterization stage)
clipping; discard all fragments outside your view
out: fragment shader
fragment shader
calculate final color of a pixel
like lights, shadows, color of the light…
alpha test and blending stage
vertex buffer objects (VBO)
store a large number of vertices in the GPU’s memory.
buffer type:
GL_ARRAY_BUFFERSending data to the graphics card from the CPU is relatively slow, so wherever we can we try to send as much data as possible at once
new call: glBindBuffer
copy call: glBufferData
GL DRAW:
GL_STREAM_DRAW: the data is set only once and used by the GPU at most a few times.GL_STATIC_DRAW: the data is set only once and used many times.GL_DYNAMIC_DRAW: the data is changed a lot and used many times.
vertex shader
input;
layout (location = 0)
uniforms
global;
setting attributes that may change every frame
interchanging data between your application and your shaders
any form that manually specify
tightly packed; offset/stride
glVertexAttribPointertell OpenGL how it should interpret the vertex data (per vertex attribute)
glEnableVertexAttribArrayenable the vertex attribute
vertex attributes are disabled by default.
predefined
gl_Position; output of the vertex shader
compiling shader
glCreateShaderglShaderSourceglCompileShader
vertex array object (VAO)
Calls to
glEnableVertexAttribArrayorglDisableVertexAttribArray.Vertex attribute configurations via
glVertexAttribPointer.Vertex buffer objects associated with vertex attributes by calls to
glVertexAttribPointer.
element buffer objects (EBO)
indexed drawing
stores indices that OpenGL uses to decide what vertices to draw.
textures
a 2D image (even 1D and 3D textures exist) used to add detail to an object
texture coordinate
uv: bl(0,0) -> tr(1,1)
sampling
Retrieving the texture color using texture coordinates
Texture Wrapping
specify coordinates outside of (0,1)
GL_REPEAT: The default behavior for textures. Repeats the texture image.GL_MIRRORED_REPEAT: Same as GL_REPEAT but mirrors the image with each repeat.GL_CLAMP_TO_EDGE: Clamps the coordinates between 0 and 1. The result is that higher coordinates become clamped to the edge, resulting in a stretched edge pattern.GL_CLAMP_TO_BORDER: Coordinates outside the range are now given a user-specified border color.
glTexParameter
Texture Filtering
for sharp edges
GL_NEARESTGL_LINEAR
Mipmaps
sqrt
high resolution for far object
low resolution for near object
glGenerateMipmapfiltering
loading and creating
texture(texture, corrd)in GLSLTexture Units
glActiveTextureglBindTextureglTexImage2D
Transformations
vector
matrix
transition $$ \begin{bmatrix} S1&0&0&Tx\ 0&S2&0&Ty\ 0&0&S3&Tz\ 0&0&0&1 \end{bmatrix}* \begin{bmatrix} x\ y\ z\ 1\ \end{bmatrix}= \begin{bmatrix} S1x+Tx\ S2y+Ty\ S3*z+Tz\ 1\ \end{bmatrix} $$
rotation
GLM
OpenGL Mathematics
glm::vec4glm::mat4glm::translateglm::rotateglm::scaleglm::radians…
坐标系
Local space (or Object space)
World space
View space (or Eye space)
camera
Clip space
projection matix
glm::ortho
perspective projection
glm::perspective
Screen space
putting it all together
$V_{clip} = M_{projection}* M_{view} * M_{model}* V_{local}$
the result ->
gl_Position
z-buffer
depth-testing
decide when to draw over a pixel or not
glEnable(GL_DEPTH_TEST)glClear(GL_COLOR_BUFFER_BIT | GL_DEPTH_BUFFER_BIT)
Camera
position
direction
right axis
up axis
look at $$ LookAt = \begin{bmatrix} R_x&R_y&R_z&0\ U_x&U_y&U_z&0\ D_x&D_y&D_z&0\ 0&0&0&1\ \end{bmatrix} * \begin{bmatrix} 1&0&0&-P_x\ 0&1&0&-P_y\ 0&0&1&-P_z\ 0&0&0&1\ \end{bmatrix} \= \begin{bmatrix} R_x&R_y&R_z&-R_xP_x-R_yP_y-R_zP_z\ U_x&U_y&U_z&-U_xP_x-U_yP_y-U_zP_z\ D_x&D_y&D_z&-D_xP_x-D_yP_y-D_z*P_z\ 0&0&0&1\ \end{bmatrix} $$
Euler angles
pitch; x axis
yaw; y axis
roll; z axis
zoom
fov; field of view
Review (Copy)
OpenGL: a formal specification of a graphics API that defines the layout and output of each function.
GLAD: an extension loading library that loads and sets all OpenGL’s function pointers for us so we can use all (modern) OpenGL’s functions.
Viewport: the 2D window region where we render to.
Graphics Pipeline: the entire process vertices have to walk through before ending up as one or more pixels on the screen.
Shader: a small program that runs on the graphics card. Several stages of the graphics pipeline can use user-made shaders to replace existing functionality.
Vertex: a collection of data that represent a single point.
Normalized Device Coordinates: the coordinate system your vertices end up in after perspective division is performed on clip coordinates. All vertex positions in NDC between -1.0 and 1.0 will not be discarded or clipped and end up visible.
Vertex Buffer Object: a buffer object that allocates memory on the GPU and stores all the vertex data there for the graphics card to use.
Vertex Array Object: stores buffer and vertex attribute state information.
Element Buffer Object: a buffer object that stores indices on the GPU for indexed drawing.
Uniform: a special type of GLSL variable that is global (each shader in a shader program can access this uniform variable) and only has to be set once.
Texture: a special type of image used in shaders and usually wrapped around objects, giving the illusion an object is extremely detailed.
Texture Wrapping: defines the mode that specifies how OpenGL should sample textures when texture coordinates are outside the range: (0, 1).
Texture Filtering: defines the mode that specifies how OpenGL should sample the texture when there are several texels (texture pixels) to choose from. This usually occurs when a texture is magnified.
Mipmaps: stored smaller versions of a texture where the appropriate sized version is chosen based on the distance to the viewer.
stb_image: image loading library.
Texture Units: allows for multiple textures on a single shader program by binding multiple textures, each to a different texture unit.
Vector: a mathematical entity that defines directions and/or positions in any dimension.
Matrix: a rectangular array of mathematical expressions with useful transformation properties.
GLM: a mathematics library tailored for OpenGL.
Local Space: the space an object begins in. All coordinates relative to an object’s origin.
World Space: all coordinates relative to a global origin.
View Space: all coordinates as viewed from a camera’s perspective.
Clip Space: all coordinates as viewed from the camera’s perspective but with projection applied. This is the space the vertex coordinates should end up in, as output of the vertex shader. OpenGL does the rest (clipping/perspective division).
Screen Space: all coordinates as viewed from the screen. Coordinates range from 0 to screen width/height.
LookAt: a special type of view matrix that creates a coordinate system where all coordinates are rotated and translated in such a way that the user is looking at a given target from a given position.
Euler Angles: defined as yaw, pitch and roll that allow us to form any 3D direction vector from these 3 values.
Light
Colors
rgb
light
reflected from objects
PBR
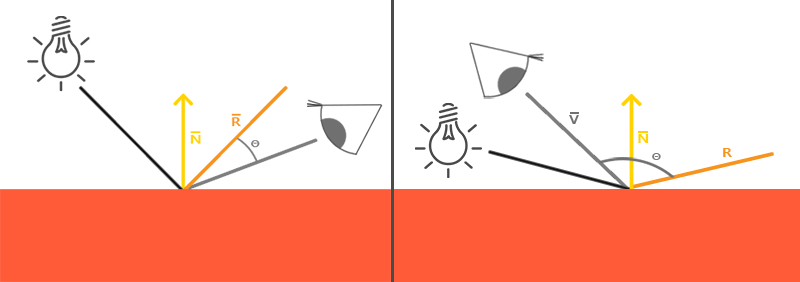
Basic Lighting
Phong lighting model
ambient lighting
diffuse lighting
normal vector
translations should not have any effect on the normal vectors
normal matrix; remove the effect of wrongly scaling
Normal = mat3(transpose(inverse(model))) * aNormalcalculate the normal matrix on the CPU and send it to the shaders via a uniform before drawing (just like the model matrix).
specular lighting
Materials
struct Material {
vec3 ambient;
vec3 diffuse;
vec3 specular;
float shininess;
};
struct Light {
vec3 position;
vec3 ambient;
vec3 diffuse;
vec3 specular;
};
Lighting maps
diffuse maps
specular maps
struct Material {
sampler2D diffuse;
sampler2D specular;
float shininess;
};
other map
normal/bump maps
reflection maps
Light Casters
direction light
direction
point light
attenuation: $$F_{att} = \frac{1.0}{K_c + K_l * d + K_q * d^2} $$
spot light
direction
cutoff angle
smooth / soft edges $$I = \frac{\theta - \gamma}{\epsilon}$$
Multiple Lights
Review
Color vector: a vector portraying most of the real world colors via a combination of red, green and blue components (abbreviated to RGB). The color of an object is the reflected color components that an object did not absorb.
Phong lighting model: a model for approximating real-world lighting by computing an ambient, diffuse and specular component.
Ambient lighting: approximation of global illumination by giving each object a small brightness so that objects aren’t completely dark if not directly lit.
Diffuse shading: lighting that gets stronger the more a vertex/fragment is aligned to a light source. Makes use of normal vectors to calculate the angles.
Normal vector: a unit vector that is perpendicular to a surface.
Normal matrix: a 3x3 matrix that is the model (or model-view) matrix without translation. It is also modified in such a way (inverse-transpose) that it keeps normal vectors facing in the correct direction when applying non-uniform scaling. Otherwise normal vectors get distorted when using non-uniform scaling.
Specular lighting: sets a specular highlight the closer the viewer is looking at the reflection of a light source on a surface. Based on the viewer’s direction, the light’s direction and a shininess value that sets the amount of scattering of the highlight.
Phong shading: the Phong lighting model applied in the fragment shader.
Gouraud shading: the Phong lighting model applied in the vertex shader. Produces noticeable artifacts when using a small number of vertices. Gains efficiency for loss of visual quality.
GLSL struct: a C-like struct that acts as a container for shader variables. Mostly used for organizing input, output, and uniforms.
Material: the ambient, diffuse and specular color an object reflects. These set the colors an object has.
Light (properties): the ambient, diffuse and specular intensity of a light. These can take any color value and define at what color/intensity a light source shines for each specific Phong component.
Diffuse map: a texture image that sets the diffuse color per fragment.
Specular map: a texture map that sets the specular intensity/color per fragment. Allows for specular highlights only on certain areas of an object.
Directional light: a light source with only a direction. It is modeled to be at an infinite distance which has the effect that all its light rays seem parallel and its direction vector thus stays the same over the entire scene.
Point light: a light source with a location in a scene with light that fades out over distance.
Attenuation: the process of light reducing its intensity over distance, used in point lights and spotlights.
Spotlight: a light source that is defined by a cone in one specific direction.
Flashlight: a spotlight positioned from the viewer’s perspective.
GLSL uniform array: an array of uniform values. Work just like a C-array, except that they can’t be dynamically allocated.
Model Loading
Assimp(Open Asset Import Library)
3D modeling tools, uv-mapping
file formats
.obj, wavefront
Assimp
import different model files formats -> Assimp’s data structure
Mesh
a class
Model
Advanced OpenGL
Depth Testing
depth-buffer
stores information per fragment
same width and height as color buffer
16/24/32 bit floats
done in screen space after the fragment shader has run
early depth testing: before fragment shader run
glEnable(GL_DEPTH_TEST);glDepthFunc‘GL_ALWAYS’
‘GL_NEVER’
‘GL_LESS’
…
depth value precision
linear buffer; never used $$F_{depth} = \frac{z-near}{far-near}$$
non-linear $$F_{depth} = \frac{1/z-1/near}{1/far-1/near}$$
z-fighting
two planes or triangles are to closely aligned
no enough precision to figure out front one
prevent z-fighting
never place objects too close to each other in a way that some of their triangles closely overlap.
set the near plane as far as possible
use a higher precision depth buffer; (cost of some performance)
Stencil Testing
discard fragment
stencil buffer
8 bits per stencil value
total of 256 different stencil values per pixel
use
Enable writing to the stencil buffer.
Render objects, updating the content of the stencil buffer.
Disable writing to the stencil buffer.
Render (other) objects, this time discarding certain fragments based on the content of the stencil buffer.
enable
glEnable(GL_STENCIL_TEST)need to clear stencil buffer each iteration
glClear(GL_COLOR_BUFFER_BIT | GL_DEPTH_BUFFER_BIT | GL_STENCIL_BUFFER_BIT)
glStencilMask(0xFF);// each bit is written to the stencil buffer as isglStencilMask(0x00);// each bit ends up as 0 in the stencil buffer (disabling writes)
stencil functions;
when a stencil test should pass or fail
glStencilFunc
glStencilFunc(GL_EQUAL, 1, 0xFF); whenever the stencil value of a fragment is equal to 1, the fragment passes the test and is drawn, otherwise discarded
glStencilOp
default:
glStencilOp(GL_KEEP, GL_KEEP, GL_KEEP)
object outlining
Enable stencil writing.
Set the stencil op to GL_ALWAYS before drawing the (to be outlined) objects, updating the stencil buffer with 1s wherever the objects’ fragments are rendered.
Render the objects.
Disable stencil writing and depth testing.
Scale each of the objects by a small amount.
Use a different fragment shader that outputs a single (border) color.
Draw the objects again, but only if their fragments’ stencil values are not equal to 1.
Enable depth testing again and restore stencil func to GL_KEEP.
Blending
the technique to implement transparency within objects
discarding framents
only display some parts of texture and ignore others
discard
blending
GL_BLENDequation $$\overline{C}{result} = \overline{C}{source} * F_{source} + \overline{C}{destination} * F{destination}$$
C: color vector
F: factor vector
source: currently stored in the color buffer; top one;
destination: output of the fragment shader; bottom one;
glBlendFunc(GLenum sfactor, GLenum dfactor)common:
GL_SRC_ALPHA, GL_ONE_MINUS_SRC_ALPHA
render semi-transparent textures
issue: transparent parts of front one are occluding the one in the background.
depth test discards them
don’t break the order
draw most distant object first and the closet object last;
outline
draw all opaque objects first
sort all the transparent objects
draw all the transparent objects in sorted order
advanced techniques
order independent transparency
Face Culling
winding order
clockwise or counter-clockwise -> front-facing or back-facing
enable
glEnable(GL_CULL_FACE)glCullFace(GL_FRONT)GL_BACK: Culls only the back faces.
GL_FRONT: Culls only the front faces.
GL_FRONT_AND_BACK: Culls both the front and back faces.
Framebuffers
e.g.
color buffer
depth buffer
stencil buffer
these buffers is stored somewhere in GPU memory and is called framebuffer
default buffers is created and configured when window created
some use cases
scene mirror
post-processing effects
creating a framebuffer
create a framebuffer object;
glGenFramebuffersbind it as the active frambuffer;
glBindFramebufferdo some operations
GL_READ_FRAMEBUFFER
GL_DRAW_FRAMEBUFFER
glReadPixelsIf you want all rendering operations to have a visual impact again on the main window we need to make the default framebuffer active by binding to 0:
glBindFramebuffer(GL_FRAMEBUFFER, 0)texture attachments
glFramebufferTexture2D(GL_FRAMEBUFFER, GL_COLOR_ATTACHMENT0, GL_TEXTURE_2D, texture, 0)attachment can be color, stencil, depth
unbind the framebuffer
render to a texture
glFramebufferRenderbufferto draw the scene to a single texture we’ll have to take the following steps:
Render the scene as usual with the new framebuffer bound as the active framebuffer.
Bind to the default framebuffer.
Draw a quad that spans the entire screen with the new framebuffer’s color buffer as its texture.
post-processing
Inversion
Grayscale
Kernel effects
kernel or convolution matrix(卷积矩阵)
e.g. a sharpen kernel $$ \begin{bmatrix} 2&2&2\ 2&-15&2\ 2&2&2\ \end{bmatrix} $$
Most kernels you’ll find over the internet all sum up to 1 if you add all the weights together. If they don’t add up to 1 it means that the resulting texture color ends up brighter or darker than the original texture value.
e.g. blur kernel; $$ \begin{bmatrix} 1&2&1\ 2&4&2\ 1&2&1\ \end{bmatrix} / 16 $$
effect of drunk/no glasses
e.g. edge detection kernel; $$ \begin{bmatrix} 1&1&1\ 1&-8&1\ 1&1&1\ \end{bmatrix} $$
highlights all edges
darken the rest
Cubemaps
combine multiple textures
6 individual 2D textures
glBindTexture(GL_TEXTURE_CUBE_MAP, textureID);skybox
if render skybox first, easily been discarded by early depth testing
trick
render skybox last
trick depth buffer into believing that skybox has the max depth value of 1.0
so that it fails the depth test wherever there’s a different objects in front of it
void main() { TexCoords = aPos; vec4 pos = projection * view * vec4(aPos, 1.0); gl_Position = pos.xyww; }
change depth function to
GL_LEQUALinstead of the DefaultGL_LESS
Environment mapping
reflection
calculate reflection vector
sample from cubemap
refraction
Snell’s law
Dynamic environment maps
a lot of tricks
…omit
Advanced Data
Batching vertex attributes
copying buffers
Advanced GLSL
GLSL’s built-in variables
gl_Position: The output position of the vertex shader, in clip space.gl_FragCoord: The window-relative coordinate of the fragment being processed.gl_FragColor: The output color of the fragment shader.gl_PointCoord: The coordinate of the current point being processed when rendering points.gl_ClipDistance: An array of values that indicate whether a primitive should be discarded based on its distance from the camera.gl_FragDepth: The depth value of the fragment being processed, used to write to the depth buffer.gl_PointSize: The size of the point being rendered.gl_FrontFacing: A Boolean value indicating whether the primitive being processed is front-facing or back-facing.gl_MaxDrawBuffers: The maximum number of draw buffers supported by the system.gl_MaxPatchVertices: The maximum number of vertices per patch supported by the system.gl_SampleID: The identifier of the current sample being processed when multisampling.gl_SampleMask: A mask indicating which samples are written by the fragment shader.gl_SampleMaskIn: A mask indicating which samples are covered by the primitive being processed.gl_NumSamples: The number of samples per pixel in the current context.
Interface blocks
Uniform buffer objects |Type|Layout rule| |–|–| |Scalar| e.g. int or bool Each scalar has a base alignment of N.| |Vector| Either 2N or 4N. This means that a vec3 has a base alignment of 4N.| |Array| of scalars or vectors Each element has a base alignment equal to that of a vec4.| |Matrices| Stored as a large array of column vectors, where each of those vectors has a base alignment of vec4.| |Struct| Equal to the computed size of its elements according to the previous rules, but padded to a multiple of the size of a vec4.|
Geometry Shader
operate on individual primitives(points,lines,triangles)
executed after the vertex shader stage and before the rasterization stage
optional supported on some graphics
e.g.
visualizing normal vectors
exploding objects
Instancing
render multiple instances of a single object
use VBOs to store the attributes of the instances
draw instances
glDrawArraysInstanced
primitives defined by arrays of vertices
glDrawElementsInstanced
primitives defined by indices into arrays of vertices
instance ID
Anti Aliasing
jagged edges
SSAA, super smaple anti-aliasing
MSAA, multisample anti-aliasing
Advanced Lighting
Adavance Lighting
Blinn-Phong
 $$
\overline{H} = \frac{\overline{L} + \overline{V}}{||\overline{L} + \overline{V}||}
$$
$$
\overline{H} = \frac{\overline{L} + \overline{V}}{||\overline{L} + \overline{V}||}
$$
Gamma Correction
all the color and brightness options we configure in our applications are based on what we perceive from the monitor and thus all the options are actually non-linear brightness/color options.
Shadows
Shadow Mapping
outline
Set up a light source: Choose a light source in the scene and set its position and direction.
Render the scene from the light’s point of view: Render the scene from the light’s point of view and store the depth information of each pixel in a texture known as a shadow map. This is typically done using a specialized pass of the rendering pipeline.
Compare the depth information of each pixel: During the main rendering pass, compare the depth of each pixel with the depth information stored in the shadow map. If the depth of a pixel is greater than the depth stored in the shadow map, then that pixel is in shadow.
Apply shadows to objects in the scene: Based on the comparison between the depth information of each pixel and the shadow map, shadows are applied to the objects in the scene by adjusting the color or brightness of each pixel.
Repeat for multiple lights: If there are multiple light sources in the scene, the process can be repeated for each light to generate multiple shadow maps, which can be combined to produce a more accurate representation of shadows in the scene.
Point Shadows
Omnidirectional shadow maps
PCF, Percentage-closer filtering
Normal Mapping
tangent space
local to the surface of a triangle
Tangent
right
Normal
up, normal vector
Bitangent
forward
Parallax Mapping
视差
displacement mapping like
outline
a height map; depth of each point of a surface
a normal map; from height map
apply offset; view angle + height
only used for 2D and static env
for dynamic env
height map with dynamic tessellation
displacement mapping
normal mapping with dynamic lighting
volumetric fog and shadows
HDR
high dynamic range
tone mapping
with gamma correction
Bloom
all brightly lit region -> glow-like effect (halo)
often with HDR
//TODO
Deferred Shading
vs. forward rendering/shading
//TODO
SSAO
AO: ambient occlusion, 环境光遮蔽
SS: screen-space
a great sense of depth
first use in Crysis(2007, Crytek)
The technique uses a scene’s depth buffer in screen-space to determine the amount of occlusion instead of real geometrical data.
occlusion factor
each fragment on a screen-filled quad
used to reduce or nullify the fragment’s ambient lighting component
obtained by taking multiple depth samples in a sphere sample kernel surrounding the fragment position
compare each of the samples with the current fragment’s depth value
sample count
too low -> banding
too high -> lose performance
randomly rotating the sample kernel
noise pattern
blurring
sample kernel used was a sphere -> flat walls look gray -> Crysis visual style
a hemisphere sample kernel oriented along a surface’s normal vector
an accelerating interpolation function -> most samples closer to its origin
Random kernel rotations
SSAO shader input:
G-buffer textures
position
normal
albedo color
noise texture
normal-oriented hemisphere kernel samples
range check for edge of a surface
ambient occlusion blur, to smooth noise pattern
apply ambient occlusion
multiply the per-fragment ambient occlusion factor to the lighting’s ambient component
PBR
Theory
physically based rendering
an approximation of reality, physically based shading, not physical shading
conditions to satisfy
be based on the microfacet surface model
be energy conserving
the amount of light that a material reflects should not exceed the amount of light that it receives
use a physically based BRDF(bidirectional reflective distribution function)
in:
light direction
view direction
surfae normal
microsurface roughness
out
scales or weighs
Cook-Torrance BRDF
DistributionGGX
GeometrySmith
fresnelSchilick fn
originally explored by Disney and adopted by Epic Games
Lighting
reflectance equation $$L_o(p,\omega_o) = \int\limits_{\Omega} (k_d\frac{c}{\pi} + \frac{DFG}{4(\omega_o \cdot n)(\omega_i \cdot n)}) L_i(p,\omega_i) n \cdot \omega_i d\omega_i$$
Textured PBR
IBL (Image based lighting)
diffuse irradiance
PBR and HDR
The radiance HDR file format
equirectangular map
sIBL archive
specular IBL
split sum approximation
pre-filtered environment map //TODO